The term ‘hacking’ essentially means an attempt to exploit a system, computer or otherwise, often for illicit reasons. But, the less nefarious definition refers to a clever technique or tip that can be used to accomplish an annoying, everyday task in a more efficient way. Many people have come up with hacks for their 3D printers, such as enabling better material mixing, improving automatic bed leveling, and even turning a 3D printing pen into a full-blown 3D printer.
A new hack reported in Hackaday uses machine vision to simplify one very specific issue with multitool 3D printers.
“Most folks that have been poking around at multi-tool 3D printing know that lining up nozzles can be a gnarly, but necessary pain point. Existing methods either have us measure offsets with a vernier scale or with a series of pictures taken with an upwards-facing camera. And this step is not to be ignored! Any mismatch between nozzles, and your multicolor prints end up looking like Scotty really screwed up those sliders on that transporter beam console,” Hackaday blogger Joshua Vasquez wrote.
Understanding 3D Printed Thread Mechanics
The automated TAMV, which stands for Tool Align Machine Vision, was created by Danal Estes, a member of Hackaday’s 3D printing community who focused on the infrastructure of multitool 3D printing. Sadly, Estes passed away recently, and I hope by sharing about his design we can perpetuate his memory.
Lining up different nozzles on a multitool 3D printer can be difficult, and it’s most commonly solved through manual means. But Estes turned to machine vision to offer an automated, thereby easier, fix for the problem, publishing everything on Github. Here, he explains that the TAMV is “for Duet based tool changing 3D printers,” and that it requires a “network connection to DUET RepRap V2 or V3 based printer” and a Raspberry Pi with the programming functions library OpenCV installed.
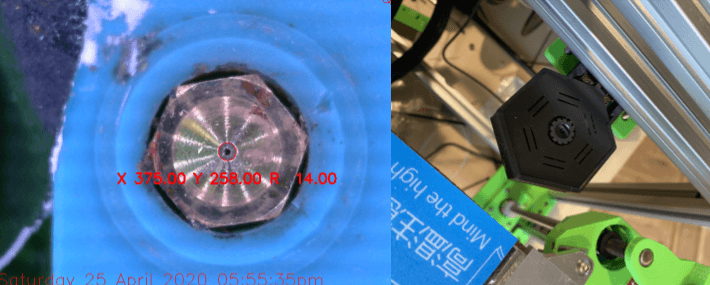
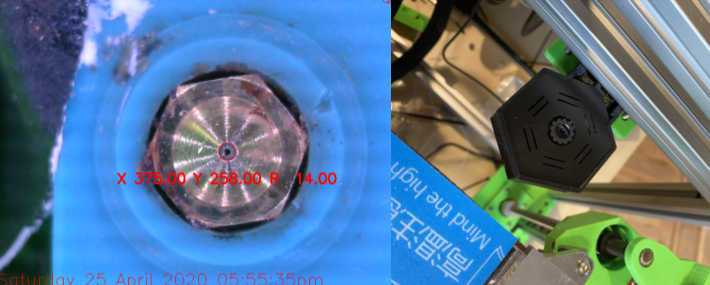
Next to his 3D printer’s motion controller, he added his Raspberry Pi and an upward-facing camera. Then he got down into the nitty gritty technicalities of the fix.
“A few lines of code (and a few hours of compiling OpenCV) later, and he had himself a circle-detecting script that automatically cycles through each tool, detects the nozzle center, and calculates an offset for each tool that’s stored into the machine’s configuration file,” Vasquez wrote.
Optimal Print Settings for Functional Threads

According to his detailed instructions, the TAMV process Estes developed uses a camera to calculate the ‘G10 Xnnn Ynnn’ commands that “go in your config.g” in order to set the X-Y alignment, so that the nozzles align correctly during multitool 3D printing. He made everything open source, and included an installation script for compiling OpenCV in addition to his instructions. Vasquez stated that this solution is “leaps and bounds ahead of what we know and it’s a great application of machine vision built on top of a stack of recognizable hardware and software.”
Before you rush right out to set up your own TAMV fix, it’s important to note that Estes created this project specifically for a tool-changing Jubilee printer that runs a Duet3 controller with a Raspberry Pi that’s connected in single-board computer mode. However, if you’re up to the challenge, the main features of TAMV can be adapted for use with other multitool 3D printers that feature a similar control board stack. You could even expand it to a standalone script that can be run locally on a PC, which allows you to print the tool offsets separately.
Vasquez concluded, “Alongside TAMV, it’s refreshing that even a decade after 3D printers have been with us, we’re still finding ways to make these machines more capable.”
Scaling and Tolerance Calibration
(Source: Hackaday)
The post Using Machine Vision to Automate Nozzle Alignment for Multitool 3D Printers appeared first on 3DPrint.com | The Voice of 3D Printing / Additive Manufacturing.
from Your daily news from 3DPrint.com https://bit.ly/3fPKJ0e
Frequently Asked Questions
Can you 3D print working threads and screws?
Yes, working threads can be 3D printed with proper settings. Layer height of 0.1mm or finer works best, with slower print speeds improving quality. CAD tools like FreeCAD’s Fasteners workbench help generate accurate thread geometries.
What are the best settings for 3D printing threads?
Use 0.1mm layer height, slow speeds (~10mm/s), and tune thread scaling parameters. Common starting points: screw scaling A0.990/B-0.050, nut scaling A1.030/B0.100. Always test print to calibrate for your printer and filament.
📌 Related Articles
- The Current State of Metal 3D Printing in 2020
- Best Budget 3D Printer Upgrades That Actually Improve Print Quality: Belts, Springs, Hotends & More
- The Ultimate Guide to 3D Printer Calibration: Complete Step-by-Step Manual
- Best 3D Printer Upgrades That Actually Improve Print Quality: Complete 2026 Guide
- The Complete 3D Printing Filament Guide: Types, Properties & When to Use Each